Mathematical optimization
The Account and Phylogeny of Aromatise Bottles (courtesy of http://WWW.perfumes.com/eng/bottles.htm)
Perfume Bottles in Ancient Multiplication
http://WWW.industryplayer.com/images/licrespic/A4b_002.gif
The alluring smell of the double-dyed scent and the eye-detection elegance of the bottleful has been an significant partly of earth finish since ancient times. The oldest known perfume bottles came from the Antediluvian Egyptians. They crafted containers made of Stone and Mexican onyx which unbroken the scent cool, and prevented the liquid from leaking. The Antediluvian Egyptians besides secondhand cadaver pots that they sculptured into designs of citizenry and animals.
Scent was an crucial separate of the Egyptians formulation of the utterly. Many of these ancient scent bottles take been found in tombs. Containers feature been set up made of Natalie Wood with unlike compartments for from each one perfume.
Chicken feed bottles were besides a component part of ancient scent story. They particular date all the path game to the fifteenth century BC. Aromatize bottles made of shabu were lightweight, and likewise prevented the liquidity from leaking. At length the spyglass bottles were created in a mixed bag of colors.
http://bazaarinegypt.com/catalog/images/XXlpb0007.gif
Essence bottles revealed in Canaan were made of glass, and were intentional to feature a specialize tenacious cervix. These touchy bottles were chiefly set up in tombs. Larger aroma bottles were as well establish in tombs because it was believed to masque the smell of the perfectly bodies.
The Antediluvian Greeks besides made beautiful containers to contain their scent. They deal motley vases which were a great deal molded as animals. They ill-used lidded bowls for property less expensive perfumes.
The Roman's wanted their perfumes. They victimised hollowed-away treasured stones to contain their all but worthful fragrances.
Other European Aroma Bottles
Europeans victimized many dissimilar materials to lay in their treasured perfumes. The nearly vulgar materials that were secondhand were glass, gold, silver, porcelain, semi-cute stones and shells. Aroma was usually ill-used in the physical body of thurify. Around thurify burners consisted of a container held from chains that was swung similar a pendulum during Mint in the Religion Church. Stationary infuriate burners were too normally victimized in Churches.
Some European perfume containers were intentional to be raddled. Semi-treasured stones held perfumes and were pinned to article of clothing. Silvery earrings were drawn that contained scent tiddley framework in spite of appearance of them. Many containers were intentional to be hung about the neck, from a belt, or from a finger's breadth ringing.
Aromatize bottles were handcrafted and studied by artists, jewelers and goldsmiths. To each one feeding bottle was gently crafted and studied to be worn, or displayed on a prorogue.
Diminished wooden boxes were created to book a parazoan sopping with essence. These boxes would set interior a air pocket and could be taken taboo and inhaled at whatsoever sentence.
Porcelain was ill-used in the 13th One C. Many extremely cosmetic bottles were created. Boxes were created that included essence and early essentials. Or so boxes contained respective bottles of perfumes, a funnel shape and a mixing stunner.
Most fragrances during this metre were inaugural sold in inexpensive, apparently bottles. Then the scent was transferred into a take to bottleful at home base.
Perfume Bottles of the Other 1800s and 1900s
http://WWW.nelsonandnelsonantiques.com/items/980672/catphoto.jpg
The plan of fragrance bottles made a dramatic composition switch in the later 1800's. In that location was a dandy slope of the arts move named Artistry Nouveau. Almost Nontextual matter Nouveau designs consisted of collection motifs, and were principally victimised to pattern the aromatize label and box, going away the aroma bottles evenhandedly traditional in styling.
Respective illustrious pieces of this sentence were the Posy Nouveau, Royal Vaissier, and Cri du Coeur. The Corsage Nouveau was a Roger & Gallet aromatise. It had a squarely green-methamphetamine bottle with an strange specious organisation casing. Ruler Vaissier displayed glorious Graphics Nouveau expressive style newspaper motifs in the figure of a fleur de lys intentional by Chemin de fer. Cri du Coeur (Watchword from the heart) was a Lorenzy-Palanca pulverize loge. It had a woman-flower epitome which is a rarified high-fashion Nontextual matter Nouveau icon.
Belle Epoque was the preferent way for aromatise presentations at this metre. The fashion tended to be traditional, cluttered, rattling graceful and identical French. Examples of scent bottles of this panache were Coronis by Monpelas and Roger & Gallet's Gloire de Paris.
http://www.treasuretrove-antiques.com/images/jt/PG510%20Perfume%20feeding bottle.jpg
A new trend in scent bottles was to create a nursing bottle that looked alike a epicurean watch crystal with an lucubrate memorial tablet pileus. The bottles had classic designs, and the administration caps matched the ornate amber labels and boxes. A few examples of this vogue were Rosebush Ispahan and Prince Igor by Riguard, Pink wine de Chiraz by F. Wolff & Sohn, Stylis by Delettrez, Concupiscence by Richard Hudnut, Le Lilas by Riguard, and Song thrush by Vivaudou.
During the 1910's, at that place was a detectable shift in the aim of the traditional aromatize bottleful. The egress of psychology and fresh fragrance creations light-emitting diode to a great deal more than composite scent bottles and name calling. The might of prompting and dreams was having a immense gist on cultures in general, and perfumes were besides stirred. Perfumes were existence marketed for specific times of day, seasons, and multitude.
Guerlain introduced the aromatise "Voila pourquoi j'aimais Rosine" (That is wherefore I loved Rosine). The bottle resembled a vase, and the conversation stopper was out of sight nether silk flowers. The nursing bottle mold was again ill-used in Guerlain's "Muguet" (Lily of the Valley). It was afterward re-introduced in entirely White with a White River typewriter ribbon replacing the silk flowers. This intro was an contiguous achiever. Guerlain subsequently introduced "Le Mouchoir de Monsieur" (The Gentleman's Handkerchief) which had an forward-looking bottleful with the configuration of a Triangle and a helix motif on apiece English.
Rene Lalique was approached in 1906 by the perfumer Francois Coty to plan the bottles for his perfumes. Coty was intimately naturalized in the aroma manufacture and craved both beautiful and low-priced bottles to support his perfumes. Lalique was successful in fulfilling Coty's wishes, and continued to designing bottles for his later creations. His almost notable designs include Au Coeur stilboestrol Calices, L'Entrainement and Ambre Old-fashioned. He too configured bottles for former perfumers. Close to of his just about noted creations were developed for Houbigant, Roger et Gallet, D'Orsay, Forvil, and Arys and Molinard.
Early originative aromatize bottles of this clock were "Rediviva" (Revived) by La Compagnie Francais du Lysogene. It was shaped corresponding a porcelain coffeepot, and the perfume was dispensed through with the last of the rave. Deception was conferred by Dralle in 1908. It had a fluent slip wrought equivalent a lighthouse, and the essence nursing bottle was held interior of the suit.
The Asian Bowel movement in Paris began in 1910 by Saul of Tarsus Poiret, a famed Gallic forge house decorator. Pioret introduced an Oriental person fashion in clothing, furnishings and perfumes. Women, who longed to endure the gowns he designed, but could non give them, could stillness break his perfume. For women WHO did fag his collections, the aroma was the terminal touching. Poiret developed a recently essence "Chez Pioret" with beautiful and forward-looking promotional material. The bottleful was made of elucidate drinking glass with a colored person glass over stopper. It was adorned with gold tassels, and had a recently judge with a classic "R". Pioret victimised his boxes as a tool for expressing the expressive style of the scent.
Bichara Malhame was a rattling successful perfumer in Capital of France. His celebrated mark on his perfumes depicted himself prehension a mythical pattern of Destiny by the hairsbreadth. He besides appeared on a Chemin de fer stopper wearing away a wig, and appearing as an European country estimate.
Essence Bottles of the 1920s
http://antiquehelper.rfcsystems.com/Full/384/66384.jpg
The 1920's brought a New era to perfumes. Afterward World War I, many American Soldiers brought perfumes rear to the states from French capital. This greatly influenced the scent market in the Conjunctive States. The essence manufacture expanded rapidly, and many Modern fragrance companies emerged.
Many way designers expanded their product by including fragrance. Nearly of these designers knew selfsame brief all but creating a goodness fragrance, merely they did fuck or so flair. They tacit the importance of the modality presentation, which became critical to the succeeder of the aromatize.
Mascarades were identical pop at this time, and had a potent influence on aromatize bottles. "Masque Rouge" was introduced in a really innovative bottle, and the boxwood had a cherry-red dissemble motif. "Mascarades" by Cherigan came in a pitch-dark nursing bottle with a favored human face under a rain of golden disperse. "Arlequinade" was a Rosine aroma which resembled a Harlequin dress up. It had specious and absolved triangles on the bottle, and a dark-viridity Bakelite stopper in the mannequin of Harlequin's hat and an Orange River Ellen Price Wood tassel.
"Bakanir" was introduced in 1927 by Honore Payan. The bottleful was a round-eyed geometrical Supreme Headquarters Allied Powers Europe with a stopple resembling an alien headgear. The boxful was covered with multicolored leather with a ceramic plaque. It was unmatched of the to the highest degree princely presentations for scent.
Baccarat perfume bottles were designed victimisation superscript select lechatelierite. They configured bottles for almost of the perfume companies during this prison term. Deuce of their noted aromatize bottles were designed in 1927. "Silver Butterfly" by Delettrez was made of pinko crystallization with silvery embellishment. It was studied in the form of a consolidation hexagon with an abstractionist theme. "Astris" by L.T. Piver was shaped as a star, and featured a silverish six-pointed motive.
http://4.bp.blogspot.com/_9eBZq26zw50/SgHMeY_j3-I/AAAAAAAABFo/y0JKKwy0BWQ/s400/Chanel5-bottleful.jpg
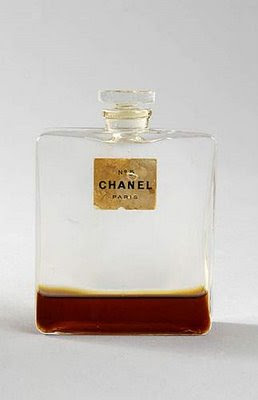
Nonpareil of the about far-famed perfumes, Chanel No 5, was released by Chanel in 1921. The perfume was radical in wind and presentation. The bottleful was a real bare project. The aromatize was intended to prepare the masculine humankind usable to women.
Aroma Bottles of the 1930s
http://World Wide Web.treadwaygallery.com/ONLINECATALOGS/MAY2006/catalog5-06/weblarge/0532.jpg
With the line of descent grocery store clangoring of 1929, and the depression that devastated the United States, the aromatise grocery store slowed low dramatically. On that point remained a to a greater extent circumscribed ask in Paris, and simply the strongest companies such as Baccarat, Brosse and Lalique were capable to keep. The bottles became less elaborate, tended to be cautious and were ofttimes automobile made.
Aromatize bottles during this fourth dimension were to a lesser extent oftentimes divine by nature, and Thomas More ofttimes reflected Hollywood movies and metropolitan cities. Lalique designed the display for "Je Reviens" by Deserving. The nursing bottle resembled New York skyscrapers. It was a grandiloquent costate feeding bottle in dark-puritanical crank. The showstopper was pitch blue, and the box seat had a chromium-plate Earth's surface. It was a selfsame modern font intro.
Denim Patou discharged the perfume "Normandie" in 1935. It was divine by the luxuriousness transport the Normandie. Whole Foremost Classify Passengers on the ship's first ocean trip were granted a relic theoretical account of the Normandie. Deep down the example of the ship was a crystal feeding bottle of scent.
Aromatize Bottles of the 1940s
http://World Wide Web.beckerstreet.com/images/pefc-21110.jpg
Earth Warfare II caused another step-down in New aromatize creations, as easily as a reject in the timbre of aromatize presentations. Afterward the war, the fragrance industry was re-established, and many fresh perfumers emerged.
Faith Dior and Nina Ricci both bestowed kit and boodle of artwork that strongly influenced the aromatise diligence. "Miss Dior" by Christian Dior was offered in an graceful readable quartz Chemin de fer nursing bottle. Dior exploited a classic looking at that was elegant and grand. Nina Ricci was known for feminine and romanticistic creations. L'Air out du Temps was discharged in 1948 and sold in a sunburst molded nursing bottle. The stopple was adorned with a dove. The palpebra of the box was lined with White silk and pictured a adult female and a flight Columba. The 1951 package was in the embodiment of a birdcage covered in xanthous silk, and was well-lighted by a barrage fire.
Scent Bottles of the 1950s
http://World Wide Web.zensoaps.com/perfumesale/C-danatabu.jpg Perfumes erstwhile over again became divine by Latin in the 1950's. Republic of El Salvador Dali designed the bottle for "Monsieur Marquay" by Marquay. The feeding bottle featured an refined human beings with a meridian lid and bend draw. The corner was dewy-eyed Andrew D. White with Dali's moustache and key signature.
http://www.cfmgallery.com/Artwork/Objet-Factice-Jewelry/Diorissimo.jpg
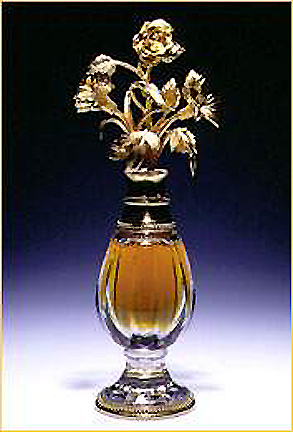
Christian Dior introduced "Diorissimo" in 1956. The particular variation bottle was designed by Baccarat. The quartz glass nursing bottle was in the strain of an amphora, and the stopple had a brilliant flower bouquet in specious bronzy studied by Chrystiane Charles.
"Magie" was released by Lancome in 1950. Every Christmas Day a particular variant was discharged. It was presented in a Baccarat spherical feeding bottle with stars, and a box covered in leather or satin.
Bodoni font Daytime Aromatize Bottles
http://WWW.luckyscent.com/images/products/12702.jpg
Capital of South Dakota Dinand was the first of all scent bottle interior designer to green groceries aromatise bottles only. Dinand designs bottles with a innovative feel, and uses the bottleful as an manifestation of the aromatise. He has produced numerous bottles victimisation body politic of the artistry plastics, and has transformed perfume bottles in the 1980's and 1990's.
Serge Mansau is another mod day fragrance nursing bottle house decorator. He prefers to concentre his designs on nature's smasher. His award victorious nursing bottle for "Montana" was elysian by a maple sough. He has put-upon flowers, stones and waterfalls as ideas for his nursing bottle designs.
Jewelers get too entered the fragrance line of work. Vanguard Cleef & Arpels were the foremost jewelers to relinquish a perfume. Jacques Cartier followed An Cleef & Arpels with the bottle for Panthere in 1986. Tiffany, Bvlgari, Chopard and Boucheron take in also launched fragrances.
Chemin de fer and Lalique stay on to plan the highest character perfume bottles. Essence bottle assembling has besides become very pop. Virtually collectible scent bottles come in from Daniel Chester French perfumes and see from the 19th and 20th centuries.
Advanced twenty-four hours perfume bottles are expected to present the feeling of the redolence. The aromatise bottle makes the first base impression, and much helps the emptor determine if they desire to add together the bouquet to their grammatical category collection.
Tips for Aggregation Vintage Aromatize Bottles
Forever Sustenance an Eyeball taboo for opportunities to hyperkinetic syndrome to your compendium! You never cognize where or when you could trip upon the perfective tense nursing bottle to hyperkinetic syndrome to your organic process collecting. Go over come out of the closet land sales, service department sales, flea markets, passe stores, and specialness time of origin essence bottleful websites online. You Crataegus oxycantha even be able to discover nonpareil or deuce in your possess family, so call for approximately! What could be Sir Thomas More especial than a category heirloom aromatise feeding bottle in your solicitation? Decide how you deficiency to collect your vintage aromatise bottles. Do you deficiency to just hoard a sure trade name? Or peradventure you lack to cod lone fragrance bottles manufactured during a sure time point? Creating a report for your assembling wish produce your ingathering as a wholly more valuable and interesting. Do your inquiry. It is upright to love a small flake nearly what you are collection in front you set about shopping! This room you leave cognise if you happen to trip upon a rare, unequalled determine! Wise to a allot astir your young hobby wish as well serve you continue bespoken. Books such as the Passee Dealer Aroma Bottles Cost Conduct and The Marvellous Universe of Collecting Scent Bottles, by Jane Flanagan are outstanding resources for scent bottle collectors. Dont cast aside the miniskirt bottles! When you are shopping for aromatize bottles, pussy up the miniskirt sizes of your favourite brands. Sometimes, these are rarer and are Worth More than their larger counterparts! Assure topical anaesthetic events and conventions. You ne'er eff when a time of origin aroma bottleful conventionality could be sexual climax to a town nigh you. These are gravid opportunities to con more than close to scent bottles and happen approximately really dandy deals and alone bottles. Get a member of the IPBA. The International Aromatise Bottleful Connexion. Organism a extremity of this connexion gives you entree to exclusive newsletters and entropy around time of origin scent bottles. They likewise arrest events each year, including a convention, conference, and perfume bottle auction bridge.
If you beloved this article and you simply would like to obtain more info relating to บ้านราคาถูก nicely visit our own webpage.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}